
The Cluster of Excellence “Integrative Computational Design and Construction for Architecture” (IntCDC) at the University of Stuttgart has received four robotic platforms for the automated manufacture of structural timber elements and fibre elements. The robotic systems are a milestone in the research into mobile, flexible prefabrication technology and are intended to make construction more sustainable and efficient in the future.

The factory building in Neustadt-Hohenacker, a suburb of Waiblingen, looks austere, but it has its qualities: Inside the building, the world's first complete platform for cyber-physical construction is being built, the Large-Scale Construction Robotics Laboratory (LCRL). The Large-Scale Robotics Laboratory is the flagship of the Cluster of Excellence “Integrative Computational Design and Construction for Architecture” (IntCDC) at the University of Stuttgart. At the core of the lab for mobile, flexible prefabrication technology are four container-based robotic platforms. Two of them are designed for the manufacture of structural timber elements, the other two for the manufacture of fibre elements. In the future, however, the platforms can also be used as one single, reconfigurable, digital production unit.

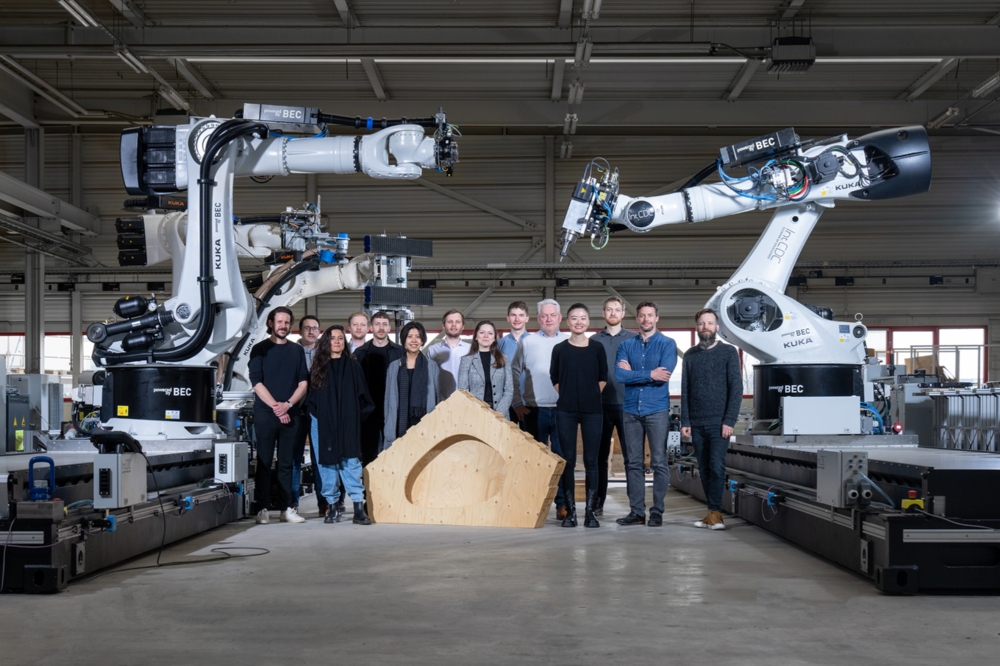
Right in the entrance area, a robot arm weighing several tons glides along a linear axis that is more than 10 metres long. Slowly, but with the precision of a bird of prey, it lowers its head down to a wooden part, milling a coffer element from it for a wooden pavilion. “It can also do that faster, up to two metres per second,” says Hans Jakob Werner, a doctoral researcher at the IntCDC. And the robot can also work cooperatively: A few metres further on, a twin robot is mounted on a parallel axis, and the two giants can machine one part together. The high stiffness enables both additive and subtractive manufacturing steps with the highest precision, and the arsenal of tools the robots have at their disposal is remarkable: Milling and sawing spindles, various grippers and claws, nail guns, automatic screwdrivers, adhesive applicators and numerous camera and sensor systems. “This allows us to perform a variety of different operations,” says postdoctoral researcher Felix Amtsberg, who coordinates the platform for timber elements.
Similar dimensions apply to the fibre-element platform a few metres further on, where resin-impregnated carbon fibres are wound into transparent lightweight elements. This unit also has two robotic arms that can glide along the axis of a 4 x 10.5 m manufacturing space and work together. This makes it possible to produce much larger and more complex structures than before. “10-metre girders can easily be manufactured, as can long-span structures,” says IntCDC doctoral researcher Christoph Zechmeister, who is investigating the production of novel, extremely lightweight, high-performance and material-efficient large-scale fibre composite components in cooperation with researchers from the Institute for Control Engineering of Machine Tools and Manufacturing Units (ISW) and the Institute of Aircraft Design (IFB).

Reconfigurable and transportable
Both units can quickly be reprogrammed, and the tools can be changed in no time at all. In addition, they can be shipped in a standard overseas container and by standard transport to manufacturing companies or directly to the construction site, as they only require a power connection and a compressed air supply on site. The robotic prefabrication near or on the construction site is a novelty – and an important prerequisite for greater efficiency in the construction sector. “Architecture is fundamentally different from other areas of production because, in the end, you always create individual pieces with project-specific requirements. For the moment, this is an obstacle to automation, although automation would be urgently needed in the construction industry, for productivity reasons and because of the considerable shortage of skilled workers,” Prof. Achim Menges, Director of the IntCDC, explains.
So far, the industry has sought a way out of this dilemma by using standardised components as they are known, in their extreme form, from panel construction. “Modular construction often leads to monotony and a lack of accuracy of fit, especially in an urban context, and does not meet the basic requirement that each building should be adapted to its environment and geographic location,” says Menges. He also points out that the transport of building components by road produces exhaust and noise emissions and limits the possible size of the components. “For this reason, we modularise the prefabrication plant by making it reconfigurable and transportable, not the construction system.”
Programming requires translation
One challenge, however, is that the design tools commonly used in architecture and the industrial robots do not speak the same language. In order to be able to program the robots, the architects’ descriptions must be translated into data models. For this task you need interdisciplinarity, says Prof. Alexander Verl, Head of the Institute for Control Engineering of Machine Tools and Manufacturing Units (ISW) at the University of Stuttgart, which is the institute responsible for this part of the project in the Cluster. “For example, if the design stipulates an indentation in a particular place, we have to program a path and precisely parameterise how much material the robot should remove, in what form and how often.”
The crux of the matter is that the “new architecture”, with its sophisticated and more complex structures, doesn’t include the concept of common parts, since each element is adapted to its specific requirements in order to be as lightweight and resource-efficient as possible. Each coffer element of a wooden structure and each fibre element of a support structure has a different geometry. “Our maxim is that the hardware remains the same and the adaptation to the different designs is done by reprogramming a digital twin – and this is done in a highly complex control environment,” says Verl. This requires not only artificial intelligence, but above all human intelligence, he adds. “We must deterministically consider what exactly we're going to need and in which position the robot can reasonably perform a certain work step.”
Interaction between humans and machines
Despite all the automation: In the production process, the robot has to deal with a human being, because it's not about replacing humans with machines, but about novel ways of collaboration between digitalisation and manual work. “Therefore, a significant portion of our research in the Cluster of Excellence is concerned with new forms of human-machine interaction,” explains Achim Menges. For this purpose, the scientists use methods of augmented and mixed reality, both visually, by the Visualization Research Center (VISUS) of the University of Stuttgart, and through haptic approaches, which are developed by Dr. Katherine Kuchenbecker from the Max Planck Institute for Intelligent Systems. The researchers also rely on the digital twins mentioned above, with which they can try out how a human interacts with the robots in various situations. “Ultimately, the aim is to combine the specific skills of the robot and those of the human in a productive manner,” Menges points out.
The platform will be the core of the future Cluster building
The new robotic platforms complement the already impressive machine park of the Large-Scale Construction Robotics Laboratory, which also includes two spider cranes and one tower crane for the research on robotic crane technology as well as units for the research on concretes. An autonomous vehicle will also be added to the lab soon in order to transport the workpieces from one platform to the other.
Neustadt-Hohenacker won't be the final location of the robotic platforms: in 2025, the LCRL will move to the new Cluster building on the Vaihingen Campus of the University of Stuttgart. There, the laboratory will be the central site where the three main objectives of the IntCDC will be combined: the research on integrative and digital planning and engineering methods, the development of novel processes for cyber-physical prefabrication, and the robot-assisted construction on site, including the associated development of intelligent and sustainable building systems. In the process, the new robots are to be used for the construction of the demonstrator building first, and then become a part of the research infrastructure inside, says Menges. “The IntCDC building will be the built proof that co-design, which means digitally linking planning methods, construction processes and building systems, works and enables us to construct more attractive and more sustainable buildings.”
The German version of the article can be found here.