
At the 13th International Symposium on Visual Information Communication and Interaction (VINCI 2020), the Best Paper Award was given to the researchers David Hägele (VISUS), Moataz Abdelaal (VISUS), Ozgur Oguz (IPVS-MLR), Marc Toussaint (TU Berlin), Daniel Weiskopf (VISUS) for their publication:
Visualization of nonlinear programming for robot motion planning
Abstract
Nonlinear programming targets nonlinear optimization with constraints, which is a generic yet complex methodology involving humans for problem modeling and algorithms for problem solving. We address the particularly hard challenge of supporting domain experts in handling, understanding, and trouble-shooting high-dimensional optimization with a large number of constraints. Leveraging visual analytics, users are supported in exploring the computation process of nonlinear constraint optimization. Our system was designed for robot motion planning problems and developed in tight collaboration with domain experts in nonlinear programming and robotics. We report on the experiences from this design study, illustrate the usefulness for relevant example cases, and discuss the extension to visual analytics for nonlinear programming in general.
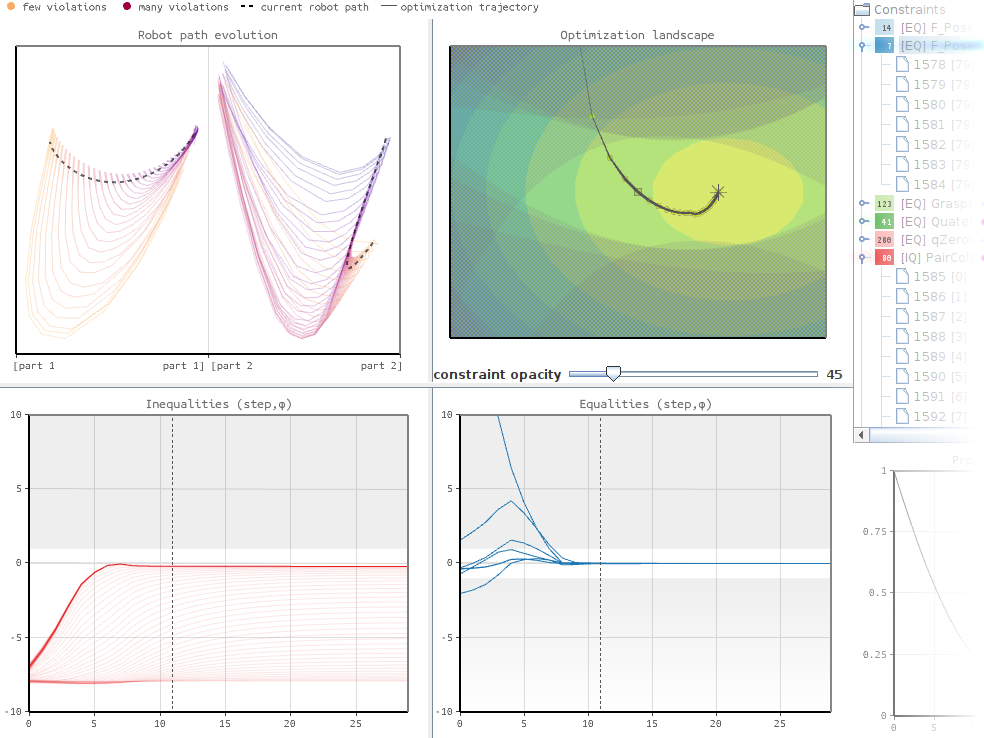
Image: David Hägele | VISUS
About the Symposium
VINCI 2020 is a premier international forum for researchers and industrial practitioners to discuss the state-of-the-art in visual communication theories, designs, applications as well as interaction via images, computer graphics, animations, virtual reality, web, or other media.